 You must have seen Transformers or what you call robots in disguise . Optimus prime with his team of autoboats fights a battle of life to save human lives. Hard to say how long will these cool animations lag behind corporeality. The modern day robots hold close affinity to humans. Fondly called humanoids, they have easy to recognize motions and improved adaptability to human environments. These androids have decided to slip into the boots of cyborgs. Here are 5 of them who are amazingly, jaw droppingly humane.
You must have seen Transformers or what you call robots in disguise . Optimus prime with his team of autoboats fights a battle of life to save human lives. Hard to say how long will these cool animations lag behind corporeality. The modern day robots hold close affinity to humans. Fondly called humanoids, they have easy to recognize motions and improved adaptability to human environments. These androids have decided to slip into the boots of cyborgs. Here are 5 of them who are amazingly, jaw droppingly humane.
Saturday, February 5, 2011
Amazing Robot who Are Almost Human
You must have seen Transformers or what you call robots in disguise . Optimus prime with his team of autoboats fights a battle of life to save human lives. Hard to say how long will these cool animations lag behind corporeality. The modern day robots hold close affinity to humans. Fondly called humanoids, they have easy to recognize motions and improved adaptability to human environments. These androids have decided to slip into the boots of cyborgs. Here are 5 of them who are amazingly, jaw droppingly humane.
WABIAN-2R

There couldn’t be a better example of human motion simulator. Exerting a massive effort to mimick humans, WABIAN-2R is an impressive bipedal humanoid robot. The humanoids WABIAN-2R has been etched out to perform specifically in human environment. Weighing moderate, 64.5 kg standing at a height of 1475 mm, WABIAN-2R imitates various human motions which are usual with humans. Its GA(Genetic Algorithm) is perfectly designed to reproduce human postures and gait.
Robonova-1Robonova-1

Amazing piece! This pre assembled humanoid (RTW) can walk, run, do flips, cartwheels, dance moves. Once you program it, Robonav is ready to compete in class J competition. With metal exoskeleton, this 12 inch mechanical man works on 16 powerful HSR-8498HB digital servos. Its feedback technology allows simple programing for various manipulated functions. Optional devices with robonova includes acceleration sensors, speech synthesis modules. The android is equipped with operational devices such as Bluetooth controllers and R/C transmitters and receivers. With a user friendly interface it allows easy customization for users. For students hobbyists, educators and students its a robo of dreams. Reminds me of the starwar R2D2.
Thursday, February 3, 2011
Our Mobile Phone Gun
Our Mobile Phone Gun Video Shown on FOX NEWS! Cell Phone Guns Discovered. Hitting the 5, 6, 7 and 8 buttons on the phone gun fires four .22-caliber rounds in quick succession. LONDON, Dec. 6 At first sight it looks like a regular cell phone same size, same shape, same overall appearance. But beneath the digital face lies a .22-caliber pistol a phone
gun capable of firing four rounds in quick succession with a touch of the otherwise standard keypad.
Range of Robots

Today everybody knows about robots. Robots are one of the best inventions of science and technology. But how many of us actually know about robots in depth? I am sure that many of you might not know so much. In simple words, a robot is a virtual or mechanical artificial agent. The word robot refers to both virtual software agents and physical robots as
wellHowever, today the robots are not limited to specific applications and are used in many different tasks. Robots are extensively used in the agriculture, medical, industrial and other fields; they are also being used at homes as caregivers for the elderly and the handicapped. Some classes of robots are mentioned below:
A Fascination with Robots

What are Robots?
In general, a robot is a programmable contraption, a machine that mimics the actions, thinking and even appearance of a human. And it is generally agreed that to qualify being called a robot, the contraption must do two things:
1) Get and process data from its surroundings,
2) Perform some labor-intensive task–such as move objects around at the very least.
2) Perform some labor-intensive task–such as move objects around at the very least.
The word robot is rooted in the Czech word robota. It connotes drudgery or slave-like labor. It found its first language exposure in the 1920 play was first used to describe fabricated workers in a fictional 1920s play by Rossum’s Universal Robots by Czech playwright Karel Capek.
In the play, a scientist invents robots for home use, helping families to perform routine tasks. But once the robots are deployed to fight wars, they turn against their human masters and rule the world. This sounds like a common theme in many fictional movies over the last decade.
The Movies
There have been fictional movies with robots in the storyline starting back since the early days of Hollywood. Over the last 40 years, there’s the highly destructive cyborg, half human and half robots made famous with Arnold Schwarzenegger’s Terminator series. But the most famous of these are R2D2 and C3PO in the Star Wars movie saga. It was also about this time when serious research and development into robotic technology have started. They wouldn’t gain much headway though until computers and software programs reached maturity in the last mid 90s.
Monday, January 31, 2011
Squirrel cage rotor motor
A squirrel cage rotor is the rotating part used in the most common form of AC induction motor. An electric motor with a squirrel cage rotor is termed a squirrel cage motor.
Theory ==
[[Image:Motor laminations by Zureks.jpg|thumb|right|Figure 3. Stator and rotor laminations]]
The field windings in the [[stator]] of an induction motor set up a [[rotating magnetic field]] around the [[rotor (electric)|rotor]]. The relative motion between this field and the rotation of the rotor induces [[electric current]] in the conductive bars. In turn these currents lengthwise in the conductors react with the magnetic field of the motor to produce [[force]] acting at a [[tangent]] [[orthogonal]] to the rotor, resulting in [[torque]] to turn the shaft. In effect the rotor is carried around with the magnetic field but at a slightly slower rate of rotation. The difference in speed is called ''slip'' and increases with load.
[[Image:Motor laminations by Zureks.jpg|thumb|right|Figure 3. Stator and rotor laminations]]
The field windings in the [[stator]] of an induction motor set up a [[rotating magnetic field]] around the [[rotor (electric)|rotor]]. The relative motion between this field and the rotation of the rotor induces [[electric current]] in the conductive bars. In turn these currents lengthwise in the conductors react with the magnetic field of the motor to produce [[force]] acting at a [[tangent]] [[orthogonal]] to the rotor, resulting in [[torque]] to turn the shaft. In effect the rotor is carried around with the magnetic field but at a slightly slower rate of rotation. The difference in speed is called ''slip'' and increases with load.
The conductors are often skewed slightly along the length of the rotor to reduce noise and smooth out torque fluctuations that might result at some speeds due to interactions with the pole pieces of the stator. The number of bars on the squirrel cage determines to what extent the induced currents are fed back to the stator coils and hence the current through them. The constructions that offer the least feedback employ prime numbers of bars.
The iron core serves to carry the magnetic field across the motor. In structure and material it is designed to minimize losses. The thin laminations, separated by varnish insulation, reduce stray circulating currents that would result in [[eddy current]] loss. The material is a low carbon but high [[silicon]] iron with several times the resistivity of pure iron, further reducing eddy-current loss. The low carbon content makes it a magnetically soft material with low [[hysteresis]] loss.

The same basic design is used for both single-phase and three-phase motors over a wide range of sizes. Rotors for three-phase will have variations in the depth and shape of bars to suit the design classification.
Sunday, January 30, 2011
Synchronous Motors
INDUCTION MOTOR CONSTRUCTION
Figure 6.1 illustrates a typical two-pole stator for an induction motor. The two main types of rotors are squirrel-cage and wound rotors. Figures 6.2 and 6.3 illustrate squirrel-cage induction motor rotors.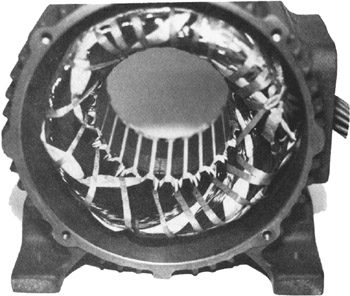
Figure 6.1: The stator of a typical induction motor, showing the stator windings. ( Courtesy of MagneTek, Inc.)
Subscribe to:
Comments (Atom)